




KY-40 ROTARY ENCODER SENSOR MODULE FOR ARDUINO NANO MINI UNO 2560
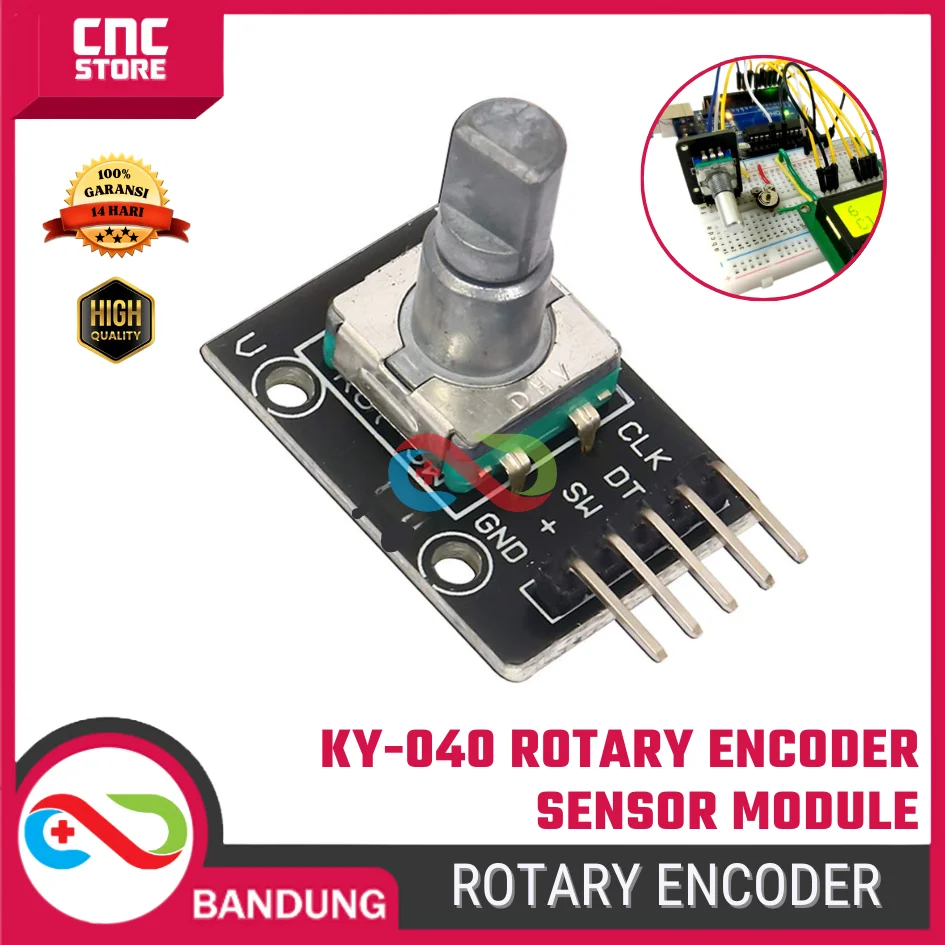
Berbeda dengan potensiometer yang memiliki batas putaran (biasanya 270°), Rotary Encoder dapat diputar tanpa batas (360°) ke arah mana pun. Selain itu, KY-40 memberikan output digital berupa pulsa, sehingga tidak akan mengalami “aus” atau nilai yang melompat-lompat seperti potensiometer analog yang sudah lama.
Modul KY-40 memiliki built-in push button. Jika kamu menekan poros (gagang) encoder, ia akan berfungsi sebagai saklar tekan. Ini sangat berguna untuk membuat antarmuka menu: putar untuk memilih opsi, dan tekan untuk konfirmasi (Enter).
Hal ini biasanya disebabkan oleh fenomena Contact Bounce (getaran mekanis saat kontak saklar terjadi). Kamu bisa mengatasinya dengan menambahkan kapasitor kecil (0.1uF) pada jalur sinyal atau menggunakan teknik Debouncing melalui kode program (Software Debounce).
KY-40 menggunakan sinyal Quadrature. Ia memiliki dua output: CLK (Phase A) dan DT (Phase B). Dengan membandingkan mana yang berubah status lebih dulu (HIGH ke LOW), mikrokontroler bisa mengetahui apakah encoder diputar ke kanan (CW) atau ke kiri (CCW).
Meskipun bisa secara teknis, KY-40 dirancang untuk interaksi manusia (input panel). Untuk mengukur RPM motor yang sangat tinggi, sebaiknya gunakan Optical Encoder atau Hall Effect Sensor karena KY-40 memiliki batasan kecepatan mekanis.