




MPU6050 3 Axis Gyroscope Accelerometer Module
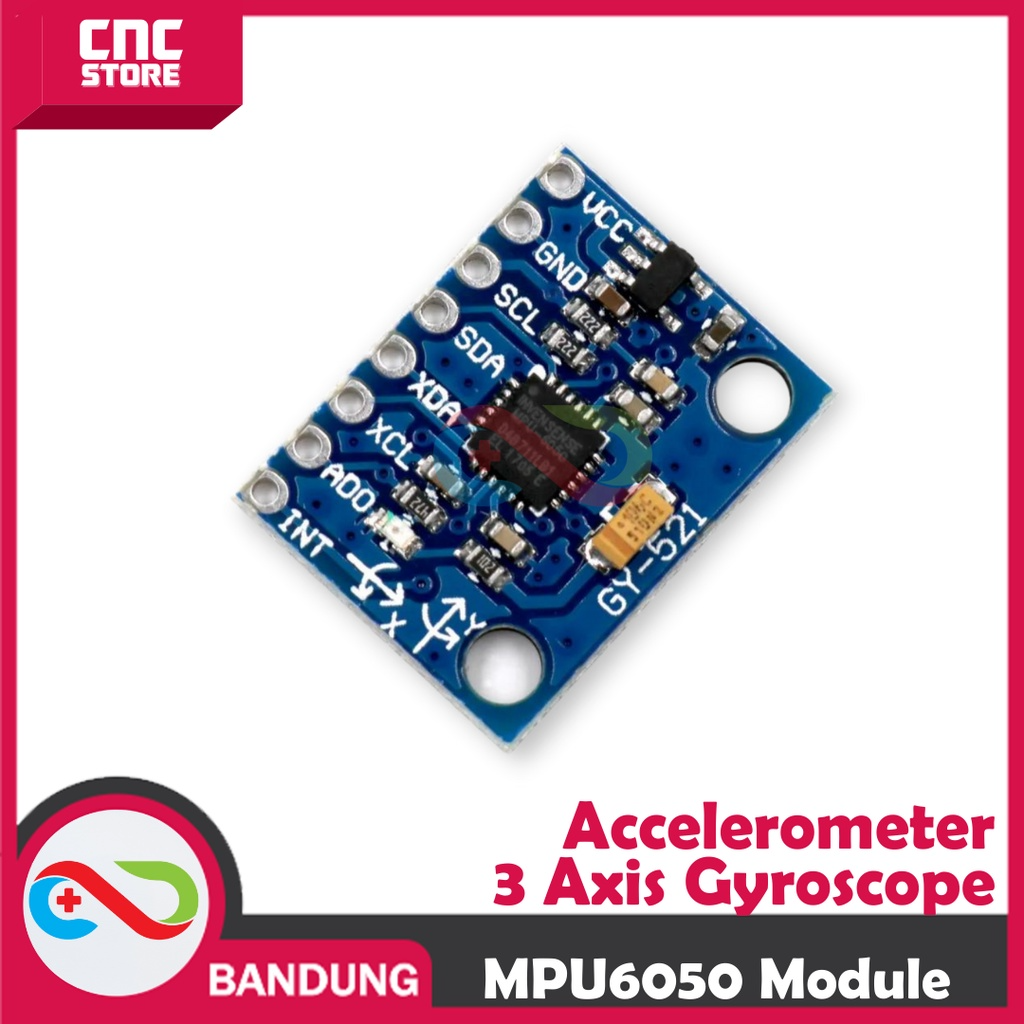
MPU6050 adalah modul sensor 6-sumbu yang menggabungkan accelerometer 3 axis dan gyroscope 3 axis dalam satu chip. Modul ini sangat populer untuk proyek DIY atau robotik yang membutuhkan pengukuran percepatan dan orientasi dalam tiga dimensi.
Accelerometer 3-axis mengukur percepatan linear pada tiga sumbu (X, Y, Z).
Gyroscope 3-axis mengukur kecepatan rotasi pada tiga sumbu yang sama.
Keduanya digunakan untuk mendeteksi gerakan dan orientasi objek secara simultan.
Modul ini digunakan dalam berbagai aplikasi, seperti:
- Stabilisasi dan kontrol gerakan (misalnya pada drone atau robot).
- Pengukur gerakan tubuh (misalnya pada alat pelacak kebugaran atau game).
- Proyek IoT yang membutuhkan pengukuran orientasi atau gerakan.
Untuk menyambungkan MPU6050 ke Arduino, ikuti langkah berikut:
- VCC ke 5V (atau 3.3V, tergantung board yang digunakan).
- GND ke GND.
- SCL ke SCL pin Arduino.
- SDA ke SDA pin Arduino.
Pastikan menggunakan library MPU6050 di Arduino IDE untuk memudahkan pembacaan data.
Kombinasi sensor: MPU6050 menggabungkan accelerometer dan gyroscope dalam satu modul, memudahkan integrasi dalam proyek.
Kompatibilitas yang luas: Modul ini bekerja dengan berbagai platform pengembangan, seperti Arduino dan Raspberry Pi.
Harga terjangkau: Dibandingkan dengan modul sensor lainnya, MPU6050 memiliki harga yang relatif lebih rendah namun menawarkan kinerja yang baik.
MPU6050 menggunakan protokol I2C (Inter-Integrated Circuit) untuk berkomunikasi dengan mikrokontroler seperti Arduino. Ini berarti hanya membutuhkan dua pin data (SCL dan SDA) untuk mengirim dan menerima data, yang membuatnya lebih efisien daripada menggunakan banyak pin.
- Sensor tidak terdeteksi oleh Arduino:
Penyebab: Seringkali disebabkan oleh koneksi kabel yang tidak benar atau pengaturan I2C yang tidak tepat.
Solusi: Pastikan kabel terhubung dengan benar ke pin SCL, SDA, VCC, dan GND. Periksa juga apakah library yang digunakan sudah benar dan pin I2C pada Arduino telah dikonfigurasi dengan benar. - Data akselerasi atau rotasi yang tidak akurat:
Penyebab: Ini bisa terjadi karena guncangan atau noise yang tidak terfilter dengan baik.
Solusi: Pastikan sensor terpasang dengan kokoh pada platform, dan gunakan filter software untuk membersihkan data dari noise. - MPU6050 tidak memberikan hasil saat dihubungkan dengan Arduino:
Penyebab: Terkadang, ini disebabkan oleh koneksi daya yang tidak stabil atau kesalahan alamat I2C.
Solusi: Cek apakah alamat I2C yang digunakan sesuai dengan yang ada di kode program Anda. Pastikan juga tegangan dan daya untuk sensor stabil. - Baterai cepat habis saat menggunakan MPU6050:
Penyebab: Sensor ini mungkin mengonsumsi daya cukup besar jika digunakan secara terus-menerus, terutama saat mengirim data secara aktif melalui I2C.
Solusi: Gunakan teknik power-saving mode atau tidur (sleep mode) pada sensor saat tidak aktif, untuk menghemat daya. - Masalah dengan pengukuran derajat rotasi:
Penyebab: Jika hasil rotasi tidak sesuai, bisa jadi karena kalibrasi sensor yang tidak tepat.
Solusi: Cobalah melakukan kalibrasi sensor untuk memastikan data yang diberikan akurat, atau gunakan library kalibrasi untuk menyesuaikan nilai-nilai yang terbaca.
Ya, MPU6050 adalah pilihan yang sangat baik untuk proyek robotik, terutama yang membutuhkan kontrol gerakan dan orientasi. Sensor ini dapat membantu robot untuk menghindari rintangan, stabilisasi gerakan, atau mendeteksi posisi secara real-time.
Jika hasil pengukuran tidak akurat, pastikan Anda telah melakukan langkah-langkah berikut:
- Pastikan sensor dalam kondisi terpasang dengan baik dan tidak terpengaruh oleh getaran atau gangguan eksternal.
- Coba kalibrasi ulang sensor menggunakan kode atau software kalibrasi.
- Periksa kode di Arduino IDE untuk memastikan pengaturan dan pembacaan sensor sudah benar.